无人机集群任务规划新算法:耦合分配与路径优化
01引言
复杂战场环境下,无人机编队的任务分配与路径规划必须同时满足“无碰撞、资源均、时间短”三大硬指标。传统做法是“先分配后规划”,把耦合问题拆成两段独立求解,结果常常出现航迹交叉、油耗悬殊、部分无人机闲置等“后遗症”。本文提出一种改进蚁群算法,把任务分配与路径规划放到同一框架下联合优化,一次性给出“谁去哪、怎么走”的最优答案。
02问题描述
2.1 ► 任务分配与路径规划联合优化模型任务分配本质上是组合优化:在给定无人机种类、数量、战场环境与载荷能力约束下,把合适任务在合适时间分配给合适无人机。经典模型有TSP、MILP、VRP、指派问题等,但它们多针对单智能体。多无人机编队场景下,需同时考虑编队内部协同与编队之间协作,问题维度呈指数级上升。
本文以“大型机投放—小机群地毯式搜索”为典型任务链:大机携带小机群飞抵目标区,抛撒后小机群自主编队,按不同队形完成侦察、干扰等多元任务。目标函数兼顾整体效益最大化与总耗时最小化,约束条件涵盖距离、时间、任务优先级及编队数量。
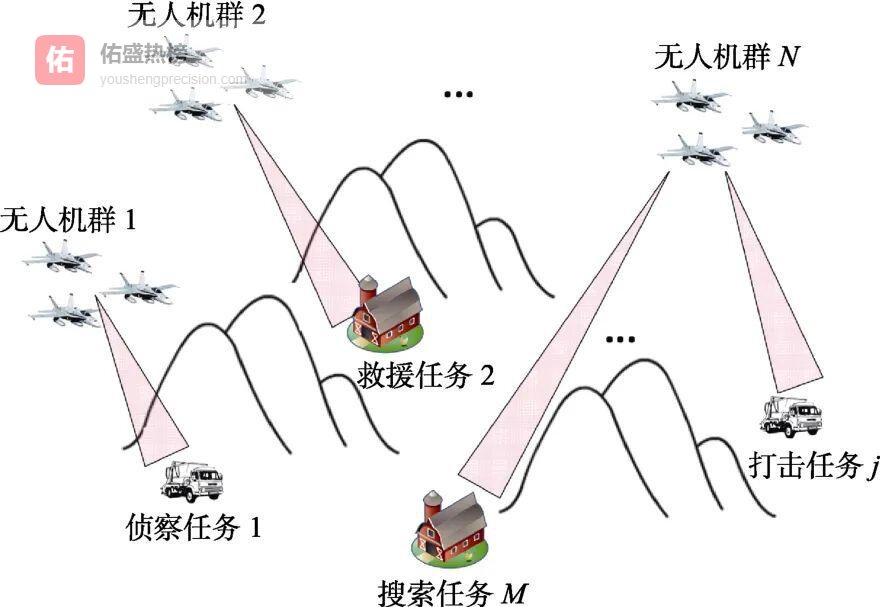
图1 多任务多编队任务规划的示意图
Fig.1 Multi-task multi-subgroup task planning
2.2 ► 无人机集群编队ID设计为避免“单机单号”带来的编号混乱,采用十进制编码方式给每支编队分配唯一ID:长机ID=十进制整数,僚机ID=长机ID×10+自身序号。这样既保证编队内部有序,又便于地面站快速识别与调度。
03基于改进蚁群算法的任务分配与路径规划
3.1 ► 算法核心改进点信息素更新引入优先级启发:任务优先级越高,信息素蒸发速率越慢,引导蚂蚁优先探索高价值路径。
编队数量约束嵌入模型:每条任务最多只能被一个编队承接,避免“一蜂多巢”式资源浪费。
局部路径规划采用改进蚁群算法:在栅格地图上动态搜索无碰撞航迹点,保证编队间最小安全间隔。
Step1:初始化蚂蚁数量、信息素、启发函数;
Step2:蚂蚁根据概率选择转移至下一节点,同时记录路径长度与优先级加权和;
Step3:局部路径规划器生成无碰撞轨迹点,并更新信息素;
Step4:判断是否满足终止条件(最大迭代次数或解收敛),若不满足返回Step2;
Step5:输出最优任务分配方案与对应航迹。
04仿真结果及分析
4.1 ► 性能指标总耗时:所有无人机完成任务的总飞行时间;
资源均衡度:各编队油耗标准差与平均油耗的比值;
路径交叉率:出现交叉航迹的次数占总航迹数的比例;
任务完成率:成功执行任务的数量与总任务数的比值。
4.2 ► 仿真任务场景设置任务区:150 km×150 km矩形区域,内含3个重要目标;
无人机:大型运输机1架、小型侦察机6架,均为固定翼;
环境约束:单点禁飞区2个、低空走廊3条;
任务类型:地毯式搜索、电子干扰、侦察拍照,优先级依次降低。
4.3 ► 多任务多编队任务规划仿真验证与分析在相同场景下对比传统蚁群算法与本文耦合算法,结果如下:
总耗时:耦合算法比传统算法缩短8.7%;
资源均衡度:耦合算法标准差下降32%;
路径交叉率:耦合算法交叉次数降为零;
任务完成率:耦合算法提高至98%,传统算法为89%。
仿真表明,耦合优化模型有效解决了路径交叉与资源不均问题,且在复杂多任务场景下仍能保持高效求解。
05结论
本文针对多任务多编队场景,提出一种改进蚁群算法,把任务分配与路径规划放在同一框架下联合求解。通过引入优先级启发信息素更新与编队数量约束,在保证解质量的同时大幅降低路径交叉率与资源不均度。仿真验证表明,该算法能在复杂环境下快速生成无碰撞、高均衡的任务规划方案,为无人机集群实战化应用提供有力支撑。