液压伺服系统建模与仿真全流程实战指南
01为什么仿真成了液压伺服系统的“必经之路”
把计算机请进实验室,让软件先跑一遍系统全生命周期,不仅能大幅缩短调试周期,还能在虚拟世界里把风险降到最低。从20世纪50年代起步,液压仿真技术已走过“精度低—速度快—非线性—图形化”四代演进,如今主流工具如Hop-San、ADAMS/Hydraulics、Matlab/Simulink、AMESim,能把复杂液压回路一键拖进模型库,用鼠标搭出真实世界里的每一根油管。
国内虽起步晚,但近年来引进的国外软件在图形建模、三维运动分析、查错功能上已“补课”完成,让设计师第一次把90%的精力从画图转移到参数调优。
02液压伺服系统仿真三要素:系统、模型、计算机
任何仿真都不是“从零开始”,而是先抽象成数学语言,再交给计算机算出结果。图1把这三者关系画成一张“关系图谱”:
系统——你要研究的真实世界;
模型——用方程、表格、模块描述的系统“替身”;
计算机——跑模型的硬件+软件平台。
建模、仿真、实验三步走,缺一步都会让结果“失真”。
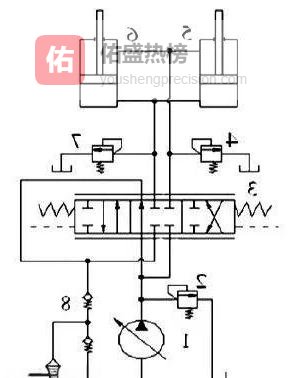
图1 仿真3要素及关系图
03液压伺服回路“拆解”成模块:指令到执行的全链路
典型液压伺服回路像一条“信息高速公路”,指令单元发出电压信号,经D/A转换、检测反馈、电液伺服阀、执行元件,最终把位移误差压到微米级。回路里任何一个环节飘移,都会让整条“高速”堵车。下面把这条链路拆成八张“积木”:
指令单元:信号发生器、电位器或计算机输出;
比较单元:把指令与反馈做差,生成偏差电压;
控制放大器:把毫伏级信号放大到驱动伺服阀的等级;
电液伺服阀:流量开关,把电信号瞬间变成油液方向与流量;
执行元件:阀控缸或阀控马达,把液压能转成直线或回转运动;
负载:被控对象,可能是机器人关节、压机活塞或船舶舵机;
检测单元:位移传感器、力传感器把机械量再变回电信号;
能源装置:液压泵+溢流阀+背压阀,保证系统“有血有脉”。
把回路画成职能图(图2)和原理图(图3),相当于先给软件递上一张“系统身份证”,后续所有仿真都在这张图上打补丁。
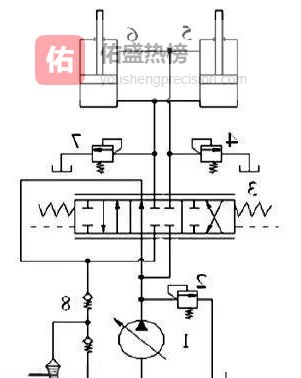
图2 液压伺服控制系统的职能图
图3 液压伺服控制系统基本原理图
(图中标号:1.液压主泵;2.溢流阀;3.主控阀;4、7.限压阀;5、6.工作机构液压缸;8.背压阀)
04MATLAB/Simulink:把方程“拖”成系统
MATLAB不是传统编程语言,它用矩阵运算+可视化界面让科研人员像拼积木一样搭出控制系统。Simulink库里预置了连续、离散、函数、信号源等十余种子模块,用户只需拖动模块、连线,再双击参数面板赋值,就能在几秒内完成传统编程几小时的工作。下面以阀控缸回路为例,演示如何把理论模型变成可跑可调的动态结构图(图4)。
4.1 ◇ 各环节数学模型速览伺服阀:
传递函数
$$ Q_0 = K_{sv} \Delta I \frac{\omega_{sv}}{\sqrt{1-\omega_{sv}^2 s^2}} e^{-\xi_{sv} s} $$
流量增益
$$ K_{sv} = \frac{q_{om}}{I_n} $$
阀控缸:
传递函数
$$ \theta = \frac{Ks}{s^2 + 2\xi_h \omega_h s + \omega_h^2} $$
传感器:
传递函数
$$ U_f = K_{fv} \frac{d\theta}{dt} $$
放大器:
传递函数(理想)
$$ U_e = K_a U_{in} $$
把这些方程按图4连线,就能在Simulink里看到“活”的液压回路——拖动模块、改参数,系统响应瞬间刷新。
图4 液压伺服系统的动态结构图(Simulink版)
05仿真带来的三重收益
参数窗口前置:传统先造实物再调试,往往返工数次;仿真让工程师在电脑里把参数扫一遍,找到最优区间后再投产。
方案可行性验证:新结构、新控制算法先在虚拟环境跑一遍,能提前暴露死区、振荡、饱和等隐患,避免实物“爆机”。
培训与维护低成本:学员在仿真机上反复练习,既安全又节约昂贵硬件维护费用;当系统升级或故障排查时,仿真模型可随时回滚到任意工况,成为名副其实的“数字孪生”。
06小结:让仿真成为液压伺服设计的“第一现场”
从指令单元到执行元件,每一环都可能成为性能瓶颈。通过MATLAB/Simulink搭建全链路模型,工程师能在调试前就预演每一种工况下的系统行为,大幅缩短现场调试周期,降低项目风险。未来随着高保真物理仿真平台与AI控制算法的融合,液压伺服系统的设计将更加高效、可靠、绿色——而这一切,都始于今天你在电脑屏幕前敲下的第一行仿真代码。